Guide, Ball Screw and Servo Motor Sizing
Today, we are going to learn basic knowledge of how to choose products for horizontal linear axis. Imagine that, this calculation can be Y axis of cnc router or X axis of big 3D printer.
I’m using Yaskawa SigmaJunmaSize+ and THK Life Calculator applications.
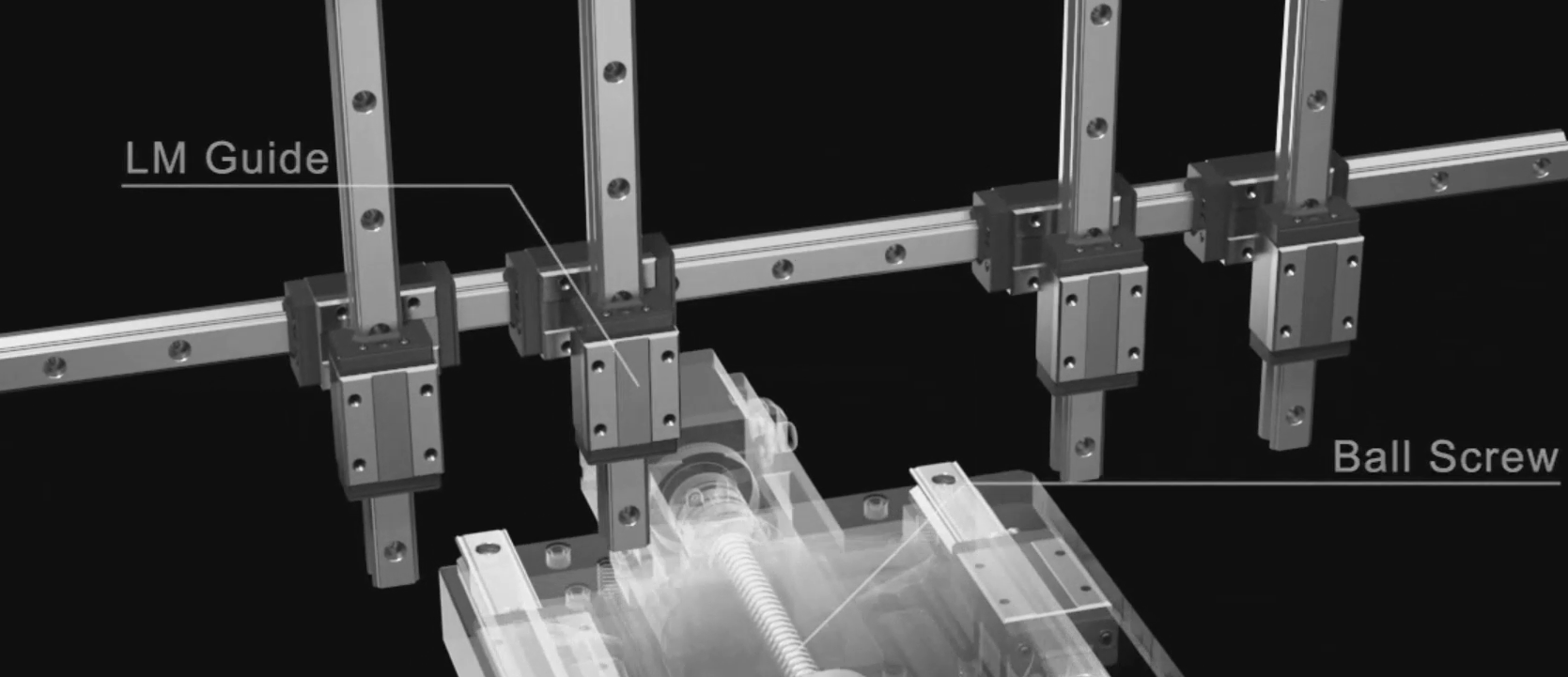
Suppose we have a 2000 kg load for the axis that will work horizontally. Let’s consider it as 4 linear guides-2 rails, and the ball screw as the drive element.

The values we want to achieve in the sample application are as shown below.
Max speed: 250mm/sec
Stroke : 2000mm
Linear Guide Sizing

First we’ll start with linear guide sizing. I’m using THK Life Calculator for this for this operation. It gives us Static Safety Factor, Nominal Life and Service Life Time values. You need to know speed expectation of system, acceleration/deceleration time and weight of the load.
Acceleration/Deceleration times are not an issue to be worried about except for extreme applications. If you have no idea about this, you can choose your average value and test your luck.
Generally, if your load is less than 4000 kg and your maximum speed is less than 250 mm/sec, you can try acceleration/deceleration time from 0.1sec for horizontal applications.
Our main goal is to keep the static safety factor close to or above 10 for this sizing application.
 HSR15 is not proper.
HSR15 is not proper.

HSR20 is not proper.

HSR20L is not proper.

HSR25 is not proper.

HSR25L can do this job with the appropriate safety factor. ( Close to 10 )
As you can see, we tried 15, 20, long type 20, 25, and long type 25 guide sizes until we found a value close to 10.
Now that we have chosen the linear system, let’s move on to the servo motor sizing program. We will select the ball screw last because we need some datas from servo application first.
Servo Motor Sizing
In the servo sizing tool, we will continue by trying the some most used leads of the ball screw (5mm, 10mm and 20mm leads are the most used.). Since I thought it would be enough, I wrote the values of the ball screw as 16mm diameter and 5 mm lead.
When sizing, I wrote the friction coefficient as 0.01 (generally recommended 0.003), the coupling inertia as 0.0001 (should be chosen from the coupling catalog according to shaft diameters and torque that can be transmittable). Since the reducer is not required in the system, I made the efficiency value 1 and entered the general efficiency as 0.9.



As a result, the program offers us a servo motor from the SGMJV series (low inertia), which is 0.75Kw and 3000rpm.
The system did not need a reducer for the load and speed values we entered.
Ball Screw Dynamic Force Check
Finally, we check the dynamic load value of the ball screw.
Acc : 2.5m/s2
Load: 2000kg
Horizontal Force at Acc/Dcc
F=m*a
F=2.5*2000
F=5000N
Ca=11.900N > 5000N
Dia 16mm , lead 5mm is OK for this system.
It is suitable to use since the dynamic load value of the ball screw is higher than the dynamic load of the system during acceleration.

We did not try to look for the coupling inertia value for this application, we entered the inertia value considering the standard couplings. If you choose the coupling according to the torque and shaft diameter, you should definitely learn this value from the coupling catalog and write it in the program.
We will also make these types of calculations in horizontal-vertical screw shaft, rack-pinion and belt-pulley applications. If you have systems you want to calculate, you can forward them from the contact section. We calculate for you free of charge and select the appropriate products.
Selection results;
Servo Motor . SGMJV-08 ( 0,75 Kw 3000rpm)
Ball Scrwe : EBB1605+4RR ( Dia 16mm , Lead 5mm )
Linear Guide : HSR25L